 Вход
ВходУсловия при возникают гармонические колебания. Механические колебания. Основы теории Максвелла для электромагнитного поля
2. Момент инерции и его вычисление
Согласно определению, момент инерции тела относительно оси равен сумме произведений масс частиц на квадраты их расстояний до оси вращения или
Однако, эта формула непригодна для вычисления момента инерции; так как масса твердого тела распределена непрерывно, то сумму следует заменить на интеграл. Поэтому для вычисления момента инерции тело разбивают на бесконечно малые объемы dV с массой dm=dV. Тогда
![]()
где R - расстояние элемента dV от оси вращения.
Если момент инерции I C относительно оси, проходящей через центр масс, известен, то можно легко вычислить момент инерции относительно любой параллельной оси О, проходящей на расстоянии d от центра масс или
I O =I C +md 2 ,
Это соотношение называется теоремой Штейнера : момент инерции тела относительно произвольной оси равен сумме момента инерции относительно оси параллельной ей и проходящей через центр масс и произведения массы тела на квадрат расстояния между осями.
3. Кинетическая энергия вращения
Кинетическая энергия вращающегося вокруг закрепленной оси твердого тела
![]()
Дифференцируя формулу по времени, получим закон изменения кинетической энергии вращающегося вокруг закрепленной оси твердого тела:
![]() –
–
скорость изменения кинетической энергии вращательного движения равна мощности момента силы.
dK вращ =M Z Z dt=M Z d K K 2 -K 1 =
т.е. изменение кинетической энергии вращения равно работе момента сил .
4. Плоское движение
Движение твердого тела, при котором центр масс перемещается в фиксированной плоскости, а ось его вращения, проходящая через центр масс, остается перпендикулярной к этой плоскости, называется плоским движением . Это движение можно свести к совокупности поступательного движения и вращения вокруг неподвижной (закрепленной) оси , так как в Ц-системе ось вращения, действительно, остается неподвижной. Поэтому плоское движение описывается упрощенной системой двух уравнений движения:
Кинетическая энергия тела, совершающего плоское движение, будет:
и окончательно
![]() ,
,
так как в данном случае i " - скорость вращения i-ой точки вокруг неподвижной оси.
Колебания
1. Гармонический осциллятор
Колебаниями вообще называются движения, повторяющиеся во времени.
Если эти повторения следуют через равные промежутки времени, т.е. x(t+T)=x(t), то колебания называются периодическими . Система, совершающая
колебания, называется осциллятором . Колебания, которые совершает система, предоставленная самой себе, называются собственными, а частота колебаний в этом случае -- собственной частотой .
Гармоническими колебаниями называются колебания, происходящие по закону sin или cos. Например,
x(t)=A cos(t+ 0),
где x(t) -- смещение частицы от положения равновесия, A -- максимальное
смещение
или амплитуда
,
t+ 0
-- фаза
колебаний, 0
--
начальная фаза (при t=0),
![]() -- циклическая
частота
,
-- просто частота колебаний.
-- циклическая
частота
,
-- просто частота колебаний.
Система, совершающая гармонические колебания, называется гармоническим осциллятором. Существенно, что амплитуда и частота гармонических колебаний постоянны и не зависят друг от друга.
Условия возникновения гармонических колебаний :на частицу (или систему частиц) должна действовать сила или момент сил, пропорциональные смещению частицы из положения равновесия и
стремящиеся вернуть ее в положение равновесия. Такая сила (или момент сил)
называется квазиупругой ; она имеет вид , где k называется квазижесткостью.
В частности это может быть и просто упругая сила, приводящая в колебания пружинный маятник, колеблющийся вдоль оси x. Уравнение движения такого маятника имеет вид:
 или
или
 ,
,
где введено обозначение .
Непосредственной подстановкой нетрудно убедиться, что решением уравнения
является функция
x=A cos( 0 t+ 0),
где A и 0 -- постоянные величины , для определения которых следует задать два начальных условия : положение x(0)=x 0 частицы и ее скорость v х (0)=v 0 в начальный (нулевой) момент времени.
Это уравнение представляет собою динамическое уравнение любых
гармонических колебаний с собственной частотой 0 . Для грузика на
пружинке период колебаний пружинного маятника
 .
.
2. Физический и математический маятники
Физический маятник -- это любое физическое тело, совершающее
колебания вокруг оси, не проходящей через центр масс, в поле сил тяжести.
Для того, чтобы собственные колебания системы были гармоническим, необходимо, чтобы амплитуда этих колебаний была мала . Кстати, то же справедливо и для пружинки: F упр =-kx только для малых деформаций пружинки x.
Период колебаний определяется формулой:
 .
.
Заметим, что квазиупругим здесь является момент силы тяжести
M я = - mgd , пропорциональный угловому отклонению .
Частным случаем физического маятника является математический маятник -- точечная масса, подвешенная на невесомой нерастяжимой нити длины l. Период малых колебаний математического маятника

3. Затухающие гармонические колебания
В реальной ситуации на осциллятор со стороны окружающей среды всегда действуют диссипативные силы (вязкого трения, сопротивления среды)
![]() ,
которые замедляют движение. Уравнение
движения тогда принимает вид:
,
которые замедляют движение. Уравнение
движения тогда принимает вид:
 .
.
Обозначая и , получаем динамическое уравнение собственных затухающих гармонических колебаний:
 .
.
Как и в случае незатухающих колебаний, это общая форма уравнения.
При не слишком большом сопротивлении среды
![]()
Функция
![]() представляет
собою убывающую по экспоненте амплитуду
колебаний. Это уменьшение амплитуды
называется релаксацией
(ослаблением) колебаний, а
называется коэффициентом
затухания
колебаний.
представляет
собою убывающую по экспоненте амплитуду
колебаний. Это уменьшение амплитуды
называется релаксацией
(ослаблением) колебаний, а
называется коэффициентом
затухания
колебаний.
Время , за которое амплитуда колебаний уменьшается в e=2,71828 раз,
называется временем релаксации .
Кроме коэффициента затухания, вводится еще одна характеристика,
называемая логарифмическим декрементом затухания -- это натуральный
логарифм отношения амплитуд (или смещений) через период:
Частота собственных затухающих колебаний
![]()
зависит не только от величины квазиупругой силы и массы тела, но и от
сопротивления среды.
4. Сложение гармонических колебаний
Рассмотрим два случая такого сложения.
a) Осциллятор участвует в двух взаимно-перпендикулярных колебаниях.
В этом случае вдоль осей x и y действуют две квазиупругие силы. Тогда

Для того, чтобы найти траекторию осциллятора, следует исключить из этих уравнений время t.
Проще всего это сделать в случае кратных частот :
Где n и m -- целые числа.
В этом случае траекторией осциллятора будет некоторая замкнутая кривая, называемая фигурой Лиссажу .
Пример
:
частоты колебаний по x и y одинаковы
( 1 = 2 =),
а разность фаз колебаний
![]() (для простоты положим 1 =0).
(для простоты положим 1 =0).
 .
.
Отсюда находим: -- фигурой Лиссажу будет эллипс.
б) Осциллятор совершает колебания одного направления .
Пусть таких колебаний пока будет два; тогда
где
![]() и
и
![]() --
фазы колебаний.
--
фазы колебаний.
Аналитически колебания складывать очень неудобно, особенно, когда их
не два, а несколько; поэтому обычно используется геометрический метод векторных диаграмм .
5. Вынужденные колебания
Вынужденные колебания возникают при действии на осциллятор
внешней периодической силы, изменяющейся по гармоническому закону
с
частотой вн:
![]() .
.
Динамическое уравнение вынужденных колебаний:

Для установившегося режима колебаний решением уравнения будет гармоническая функция:
где A -- амплитуда вынужденных колебаний, а -- отставание по фазе
от вынуждающей силы.
Амплитуда установившихся вынужденных колебаний:

Отставание по фазе установившихся вынужденных колебаний от внешней
вынуждающей силы:
 .
.
\hs Итак: установившиеся вынужденные колебания происходят
с постоянной, не зависящей от времени амплитудой, т.е. не затухают,
несмотря на сопротивление среды. Это объясняется тем, что работа
внешней силы идет на
увеличение механической энергии осциллятора и полностью компенсирует
ее убывание, происходящее из-за действия диссипативной силы сопротивления
6. Резонанс
Как видно из формулы, амплитуда вынужденных колебаний
А вн зависит от частоты внешней вынуждающей силы вн. График этой зависимости называется резонансной кривой или амплитудно-частотной характеристикой осциллятора.
Темы кодификатора ЕГЭ: гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания - это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания - это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия - это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание . Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела - это величина его наибольшего отклонения от положения равновесия.
Период колебаний - это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний - это величина, обратная периоду: . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой . Положению равновесия отвечает значение . Основная задача механики в данном случае состоит в нахождении функции , дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них - синус и косинус - являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания - это колебания, при которых координата зависит от времени по гармоническому закону:
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому - амплитуда колебаний.
Аргумент косинуса называется фазой колебаний. Величина , равная значению фазы при , называется начальной фазой. Начальная фаза отвечает начальной координате тела: .
Величина называется циклической частотой . Найдём её связь с периодом колебаний и частотой . Одному полному колебанию отвечает приращение фазы, равное радиан: , откуда
(2)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1) :
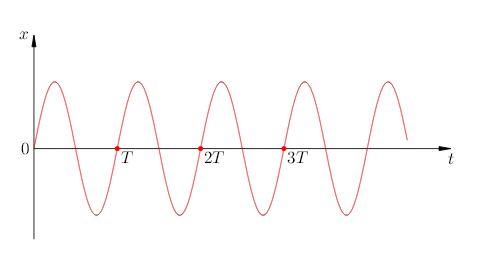
График функции (1) , выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1 .
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае , поэтому можно положить . Мы получаем закон косинуса:
График гармонических колебаний в этом случае представлен на рис. 2 .
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае , так что можно положить . Получаем закон синуса:
График колебаний представлен на рис. 3 .
 |
| Рис. 3. Закон синуса |
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1) . Дифференцируем это равенство:
. (4)
Теперь дифференцируем полученное равенство (4) :
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем :
. (6)
Это соотношение называется уравнением гармонических колебаний . Его можно переписать и в таком виде:
. (7)
C математической точки зрения уравнение (7)
является дифференциальным уравнением
. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
Решением уравнения (7) является всякая функция вида (1) с произвольными ;
Никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6) , (7) описывают гармонические колебания с циклической частотой и только их. Две константы определяются из начальных условий - по начальным значениям координаты и скорости.
Пружинный маятник.
Пружинный маятник - это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4 ). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу , жёсткость пружины равна .
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости со стороны пружины. Второй закон Ньютона для груза в проекции на ось имеет вид:
. (8)
Если (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и . Наоборот, если , то . Знаки и всё время противоположны, поэтому закон Гука можно записать так:
Тогда соотношение (8) принимает вид:
Мы получили уравнение гармонических колебаний вида (6) , в котором
Циклическая частота колебаний пружинного маятника, таким образом, равна:
. (9)
Отсюда и из соотношения находим период горизонтальных колебаний пружинного маятника:
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10) .
Математический маятник.
Математический маятник - это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5 ). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна . Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
и спроектируем его на ось :
Если маятник занимает положение как на рисунке (т. е. ), то:
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
Итак, при любом положении маятника имеем:
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство . Воспользуемся им в формуле (11) :
Это - уравнение гармонических колебаний вида (6) , в котором
Следовательно, циклическая частота колебаний математического маятника равна:
. (12)
Отсюда период колебаний математического маятника:
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания
, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6 ).
Вынужденные колебания - это колебания, совершаемые системой под воздействием внешней силы , периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна , а вынуждающая сила зависит от времени по гармоническому закону:
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7 .
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты наступает резонанс - явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы: , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний, , а амплитуда колебаний возрастает до бесконечности при .
«Физика - 11 класс»
Ускорение - вторая производная координаты по времени.
Мгновенная скорость точки - это производная координаты точки по времени.
Ускорение точки - это производная ее скорости по времени, или вторая производная координаты по времени.
Поэтому уравнение движения маятника можно записать так:
где х" - вторая производная координаты по времени.
При свободных колебаниях координата х изменяется со временем так, что вторая производная координаты по времени прямо пропорциональна самой координате и противоположна ей по знаку.
Гармонические колебания
Из математики: вторые производные синуса и косинуса по их аргументу пропорциональны самим функциям, взятым с противоположным знаком, и никакие другие функции таким свойством не обладают.
Поэтому:
Координата тела, совершающего свободные колебания, меняется с течением времени по закону синуса или косинуса.

Периодические изменения физической величины в зависимости от времени, происходящие по закону синуса или косинуса, называются гармоническими колебаниями .
Амплитуда колебаний
Амплитудой гармонических колебаний называется модуль наибольшего смещения тела от положения равновесия.
Амплитуда определяется начальными условиями, а точнее энергией, сообщаемой телу.
График зависимости координаты тела от времени представляет собой косинусоиду.
х = x m cos ω 0 t
Тогда уравнение движения, описывающее свободные колебания маятника:
Период и частота гармонических колебаний.
При колебаниях движения тела периодически повторяются.
Промежуток времени Т, за который система совершает один полный цикл колебаний, называется периодом колебаний
.
Частота колебаний - это число колебаний в единицу времени.
Если одно колебание совершается за время Т то число колебаний за секунду
В Международной системе единиц (СИ) единица частоты называется герцем (Гц) в честь немецкого физика Г. Герца.
Число колебаний за 2π с равно:

Величина ω 0 - это циклическая (или круговая) частота колебаний.
Через промежуток времени, равный одному периоду, колебания повторяются.
Частоту свободных колебаний называют собственной частотой
колебательной системы.
Часто для краткости циклическую частоту называют просто частотой.
Зависимость частоты и периода свободных колебаний от свойств системы.
1. для пружинного маятника
Собственная частота колебаний пружинного маятника равна:
Она тем больше, чем больше жесткость пружины k, и тем меньше, чем больше масса тела m.
Жесткая пружина сообщает телу большее ускорение, быстрее меняет скорость тела, а чем тело массивнее, тем медленнее оно изменяет скорость под влиянием силы.
Период колебаний равен:

Период колебаний пружинного маятника не зависит от амплитуды колебаний.
2. для нитяного маятника
Собственная частота колебаний математического маятника при малых углах отклонения нити от вертикали зависит от длины маятника и ускорения свободного падения:

Период же этих колебаний равен

Период колебаний нитяного маятника при малых углах отклонения не зависит от амплитуды колебаний.
Период колебаний возрастает с увеличением длины маятника. От массы маятника он не зависит.
Чем меньше g, тем больше период колебаний маятника и, следовательно, тем медленнее идут часы с маятником. Так, часы с маятником в виде груза на стержне отстанут за сутки почти на 3 с, если их поднять из подвала на верхний этаж Московского университета (высота 200 м). И это только за счет уменьшения ускорения свободного падения с высотой.
Колебаниями называются движения или процессы, которые характеризуются опреде-ленной повторяемостью во времени. Колебательные процессы широко распространены в природе и технике, например качание маятника часов, переменный электрический ток и т. д. При колебательном движении маятника изменяется координата его центра масс, в случае переменного тока колеблются напряжение и ток в цепи. Физическая природа колебаний может быть разной, поэтому различают колебания механические, электро-магнитные и др. Однако различные колебательные процессы описываются одинаковы-ми характеристиками и одинаковыми уравнениями. Отсюда следует целесообразность единого подхода к изучению колебаний различной физической природы.
Колебания называются свободными , если они совершаются только под воздействием внутренних сил, действующих между элементами системы, после того как система выведена из положения равновесия внешними силами и предоставлена самой себе. Свободные колебания всегда затухающие колебания , ибо в реальных системах неизбежны потери энергии. В идеализированном случае системы без потерь энергии свободные колебания (продолжающиеся как угодно долго) называются собственными .
Простейшим типом свободных незатухающих колебаний являются гармонические колебания - колебания, при которых колеб-лющаяся величина изменяется со временем по закону синуса (косинуса). Колебания, встречающиеся в природе и технике, часто имеют характер, близкий к гармоническому.
Гармонические колеба-ния описываются уравнением, которое называется уравнением гармонических колебаний:
где А - амплитуда колебаний, максимальное значение колеблющейся величины х ; - круговая (циклическая) частота собственных колебаний; - начальная фаза колебания в мо-мент времени t = 0; - фаза колебания в момент времени t. Фаза колебания определяет значение колеблющейся величины в данный момент времени. Так как косинус изменяется в пределах от +1 до -1, то х может принимать значения от +A до -А .
Время T , за которое система совершает одно полное колебание, называется периодом колебаний . За время Т фаза колебания получает приращение 2π , т. е.
Откуда . (14.2)
Величина , обратная периоду колебаний
т. е. число полных колебаний, совершаемых в единицу времени, называется частотой колебаний. Сравнивая (14.2) и (14.3) получим
Единица частоты - герц (Гц): 1 Гц - частота, при кото-рой за 1с совершается одно полное колебание.
Системы, в которых могут происходить свободные колебания, называются осцилляторами . Какими же свойствами должна обладать система, чтобы в ней могли возникнуть свободные колебания? Механическая система должна иметь положение устойчивого равновесия , при выходе из которого появляется возвращающая сила, направленная к положению равновесия . Этому положению соответствуют, как известно, минимум потенциальной энергии системы. Рассмотрим несколько колебательных систем, удовлетворяющих перечисленным свойствам.
Выбор начальной фазы позволяет при описании гармонических колебаний перейти от функции синуса к функции косинуса:Обобщенное гармоническое колебание в дифференциальном виде:
Для того чтобы свободные колебания совершались по гармоническому закону, необходимо, чтобы сила, стремящаяся возвратить тело в положение равновесия, была пропорциональна смещению тела из положения равновесия и направлена в сторону, противоположную смещению:
где – масса колеблющегося тела.
Физическую систему, в которой могут существовать гармонические колебания, называют гармоническим осциллятором, а уравнение гармонических колебаний – уравнением гармонического осциллятора.
1.2. Сложение колебаний
Неpедки случаи, когда система одновpеменно участвует в двух или нескольких независимых дpуг от дpуга колебаниях. В этих случаях обpазуется сложное колебательное движение, котоpое создается путем наложения (сложения) колебаний дpуг на дpуга. Очевидно, случаи сложения колебаний могут быть весьма pазнообpазны. Они зависят не только от числа складываемых колебаний, но и от паpаметpов колебаний, от их частот, фаз, амплитуд, напpавлений. Не пpедставляется возможным обозpеть все возможное pазнообpазие случаев сложения колебаний, поэтому огpаничимся pассмотpением лишь отдельных пpимеpов.
Сложение гармонических колебаний, направленных вдоль одной прямой
Рассмотрим сложение одинаково направленных колебаний одного периода, но отличающихся начальной фазой и амплитудой. Уравнения складываемых колебаний заданы в следующем виде:
где и – смещения; и – амплитуды; и – начальные фазы складываемых колебаний.
| Рис.2. |
Амплитуду результирующего колебания удобно определить с помощью векторной диаграммы (рис. 2), на которой отложены векторы амплитуд и складываемых колебаний под углами и к оси и по правилу параллелограмма получен вектор амплитуды суммарного колебания .
Если равномерно вращать систему векторов (параллелограмм) и проектировать векторы на ось , то их проекции будут совершать гармонические колебания в соответствии с заданными уравнениями. Взаимное расположение векторов , и при этом остается неизменным, поэтому колебательное движение проекции результирующего вектора тоже будет гармоническим.
Отсюда следует вывод, что суммарное движение - гармоническое колебание, имеющее заданную циклическую частоту. Определим модуль амплитуды А результирующего колебания. В угол (из равенства противоположных углов параллелограмма).
Следовательно,
отсюда: .
Согласно теореме косинусов ,
Начальная фаза результирующего колебания определяется из :
Соотношения для фазы и амплитуды позволяют найти амплитуду и начальную фазу результирующего движения и составить его уравнение: .
Биения
Рассмотрим случай, когда частоты двух складываемых колебаний мало отличаются друг от друга , и пусть амплитуды одинаковы и начальные фазы , т.е.
Сложим эти уравнения аналитически:
Преобразуем
| Рис. 3. |
Биения можно наблюдать при звучании двух камертонов, если частоты и колебаний близки друг к другу.
Сложение взаимно перпендикулярных колебаний
Пусть материальная точка одновременно участвует в двух гармонических колебаниях, совершающихся с одинаковыми периодами в двух взаимно перпендикулярных направлениях. С этими направлениями можно связать прямоугольную систему координат , расположив начало координат в положении равновесия точки. Обозначим смещение точки С вдоль осей и , соответственно, через и . (рис. 4).
Рассмотрим несколько частных случаев.
1). Начальные фазы колебаний одинаковы
Выберем момент начала отсчета времени таким образом, чтобы начальные фазы обоих колебаний были равны нулю. Тогда смещения вдоль осей и можно выразить уравнениями:
Поделив почленно эти равенства, получим уравнения траектории точки С:
или .
Следовательно, в результате сложения двух взаимно перпендикулярных колебаний точка С колеблется вдоль отрезка прямой, проходящей через начало координат (рис.4).
| Рис. 4. |
Уравнения колебания в этом случае имеют вид:
Уравнение траектории точки:
Следовательно, точка С колеблется вдоль отрезка прямой, проходящей через начало координат, но лежащей в других квадрантах, чем в первом случае. Амплитуда А результирующих колебаний в обоих рассмотренных случаях равна:
3). Начальная разность фаз равна .
Уравнения колебаний имеют вид:
Разделим первое уравнение на , второе – на :
Возведем оба равенства в квадрат и сложим. Получим следующее уравнение траектории результирующего движения колеблющейся точки:
Колеблющаяся точка С движется по эллипсу с полуосями и . При равных амплитудах траекторией суммарного движения будет окружность . В общем случае при , но кратным, т.е. , при сложении, взаимно перпендикулярных колебаний колеблющаяся точка движется по кривым, называемым фигурами Лиссажу.
Фигуры Лиссажу
Фигу́ры Лиссажу́ – замкнутые траектории, прочерчиваемые точкой, совершающей одновременно два гармонических колебания в двух взаимно перпендикулярных направлениях.
Впервые изучены французским учёным Жюлем Антуаном Лиссажу. Вид фигур зависит от соотношения между периодами (частотами), фазами и амплитудами обоих колебаний (рис. 5).
| Рис.5. |
В простейшем случае равенства обоих периодов фигуры представляют собой эллипсы, которые при разности фаз или вырождаются в отрезки прямых, а при разности фаз и равенстве амплитуд превращаются в окружность. Если периоды обоих колебаний неточно совпадают, то разность фаз всё время меняется, вследствие чего эллипс всё время деформируется. При существенно различных периодах фигуры Лиссажу не наблюдаются. Однако, если периоды относятся как целые числа, то через промежуток времени, равный наименьшему кратному обоих периодов, движущаяся точка снова возвращается в то же положение – получаются фигуры Лиссажу более сложной формы.
Фигуры Лиссажу вписываются в прямоугольник, центр которого совпадает с началом координат, а стороны параллельны осям координат и расположены по обе стороны от них на расстояниях, равных амплитудам колебаний (рис. 6).